سوالی دارید؟ با ما تماس بگیرید.
33 37 11 33 - 021 و 37 09 95 33 - 021
ارسال به کل کشور
برای تمامی سفارشات شما
پرداخت در بستری امن
پرداخت با توجه به شرایط مشتری
پشتیبانی آنلاین و تلفنی
در ساعات اداری
عناوین مقاله
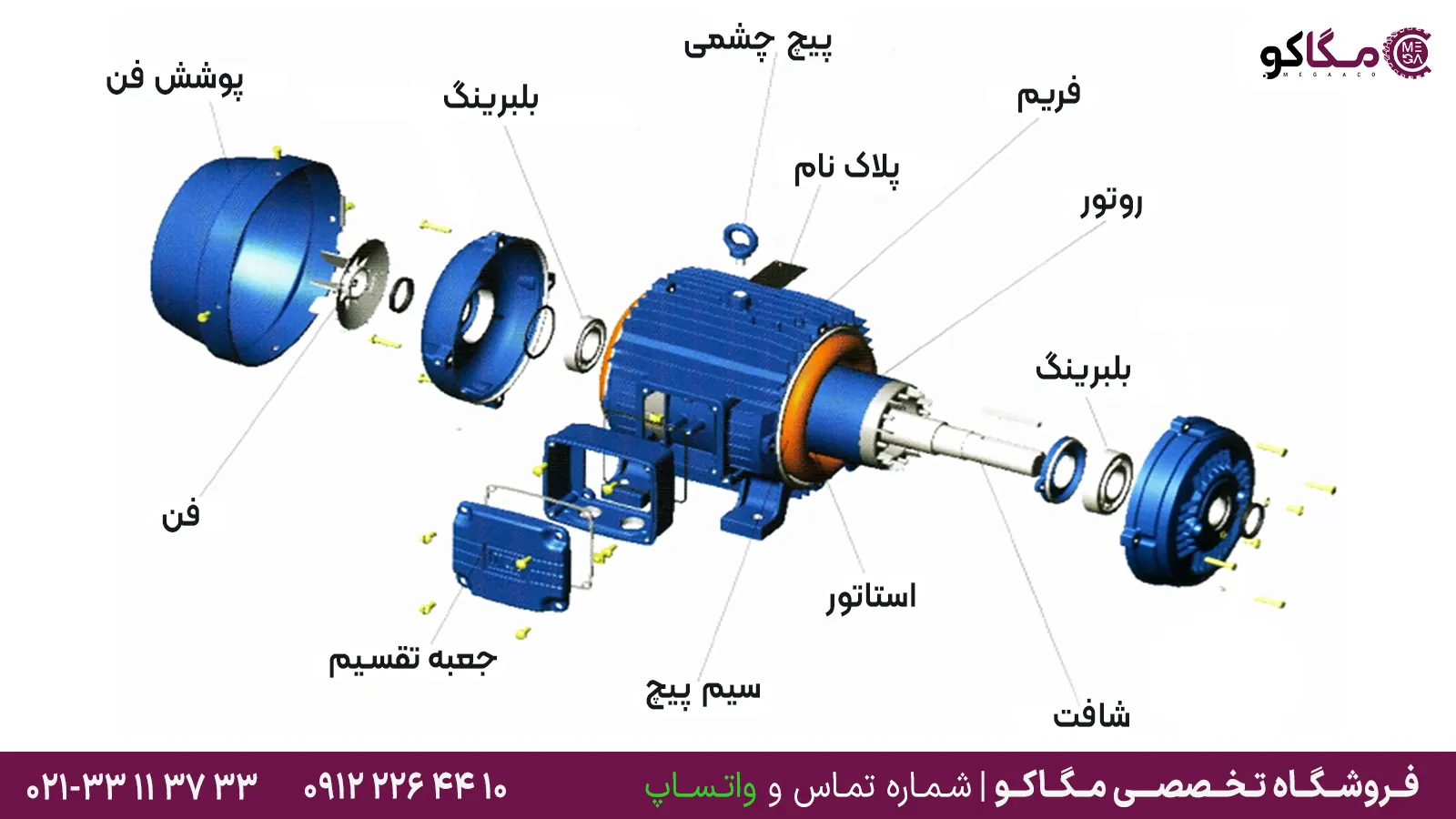
Toggleکارایی الکتروموتور: الکتروموتور یک ماشین مکانیکی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. اکثر الکتروموتورها با تولید نیرویی به شکل گشتاوری که با برهمکنش بین میدان مغناطیسی موتور و جریان الکتریکی در سیم پیچی به شافت موتور وارد می شود، کار می کنند. الکتروموتورها می توانند از طریق منابع جریان مستقیم (DC) یا جریان متناوب (AC) مانند باتری ها یا یکسو کننده ها یا با منابع جریان متناوب مانند ژنراتورهای الکتریکی، شبکه برق یا اینورترها تغذیه شوند. یک ژنراتور الکتریکی از نظر مکانیکی با یک موتور الکتریکی قابل مقایسه است، اما انرژی مکانیکی را از طریق جریان معکوس قدرت به انرژی الکتریکی تبدیل می کند.
با وجود اینکه فرصتهای زیادی برای بهبود وجود داشت، اولین الکتروموتور صنعتی مطمئناً در زمان خود یک پیشرفت محسوب میشد. سازندگان موتور الکتروموتورهای خود را برای مصرف انرژی کمتر و هزینه کمتر با رشد فناوری بهبود داده اند. در حالی که برای سازندگان طبیعی است که از به روزترین فناوری در هنگام طراحی موتورهای الکتریکی استفاده کنند.
ملاحظاتی مانند ساختار داخلی، نوع منبع تغذیه، کاربرد و نوع خروجی حرکت برای طبقه بندی موتورهای الکتریکی استفاده میشود. به غیر از AC در مقابل DC، موتورها می توانند برس یا بدون جاروبک باشند، میتوانند دارای فازهای مختلف (تک فاز، دو فاز یا سه فاز) باشند و یا با هوا یا مایع خنک شوند. برای کاربردهای صنعتی، الکتروموتورهای همه منظوره با ابعاد و ویژگی های معمولی قدرت مکانیکی مناسبی را ارائه می دهند. بزرگترین موتورهای الکتریکی با توانی تا 100 مگاوات برای نیروی محرکه کشتی، فشرده سازی خط لوله و غیره مورد استفاده قرار می گیرند. فن های صنعتی، دمنده ها و پمپ ها و همچنین ماشین ابزار، لوازم خانگی، ابزار برقی و دیسک درایوها همگی از الکتروموتورها استفاده می کنند. در ساعت های الکتریکی، موتورهای کوچکی را می توان یافت. الکتروموتورها را می توان به صورت معکوس به عنوان ژنراتور در برخی کاربردها، مانند ترمز احیا کننده با موتورهای کششی، برای بازیابی انرژی (که در غیر این صورت به عنوان گرما و اصطکاک هدر می رود) استفاده کرد.
الکتروموتور های گشتاور (نیروی خطی یا چرخشی) تولید می کنند که برای فشار دادن مکانیزم خارجی مانند فن یا آسانسور استفاده می شود. موتورهای الکتریکی با توجه به اندازه آنها اغلب برای چرخش مداوم یا حرکت خطی در فواصل زیاد ساخته می شوند. سلونوئید های مغناطیسی نیز مبدل هایی هستند که نیروی الکتریکی را به حرکت مکانیکی منتقل می کنند، اما دامنه حرکت محدودی دارند.
الکتروموتور ها بسیار کارآمدتر از موتور احتراق داخلی (ICE) هستند که در صنعت و حمل و نقل استفاده می شود. الکتروموتورها معمولاً بیش از 95٪ کارآمد هستند، در حالی که ICE ها به طور قابل توجهی زیر 50٪ هستند. آنها همچنین سبکتر، از نظر فیزیکی کوچکتر، از نظر مکانیکی سادهتر و ارزانتر برای ساخت هستند، قادر به ارائه گشتاور فوری و ثابت در هر سرعتی هستند، با انرژیهای تجدیدپذیر کار میکنند و کربن را در جو منتشر نمیکنند. الکتروموتور ها به این دلایل جایگزین موتورهای احتراق داخلی در حمل و نقل و صنعت می شوند، در حالی که استفاده از آنها در وسایل نقلیه در حال حاضر به دلیل هزینه و وزن بالای باتری ها و با محدوده مناسب بین شارژ باتری، محدود است.
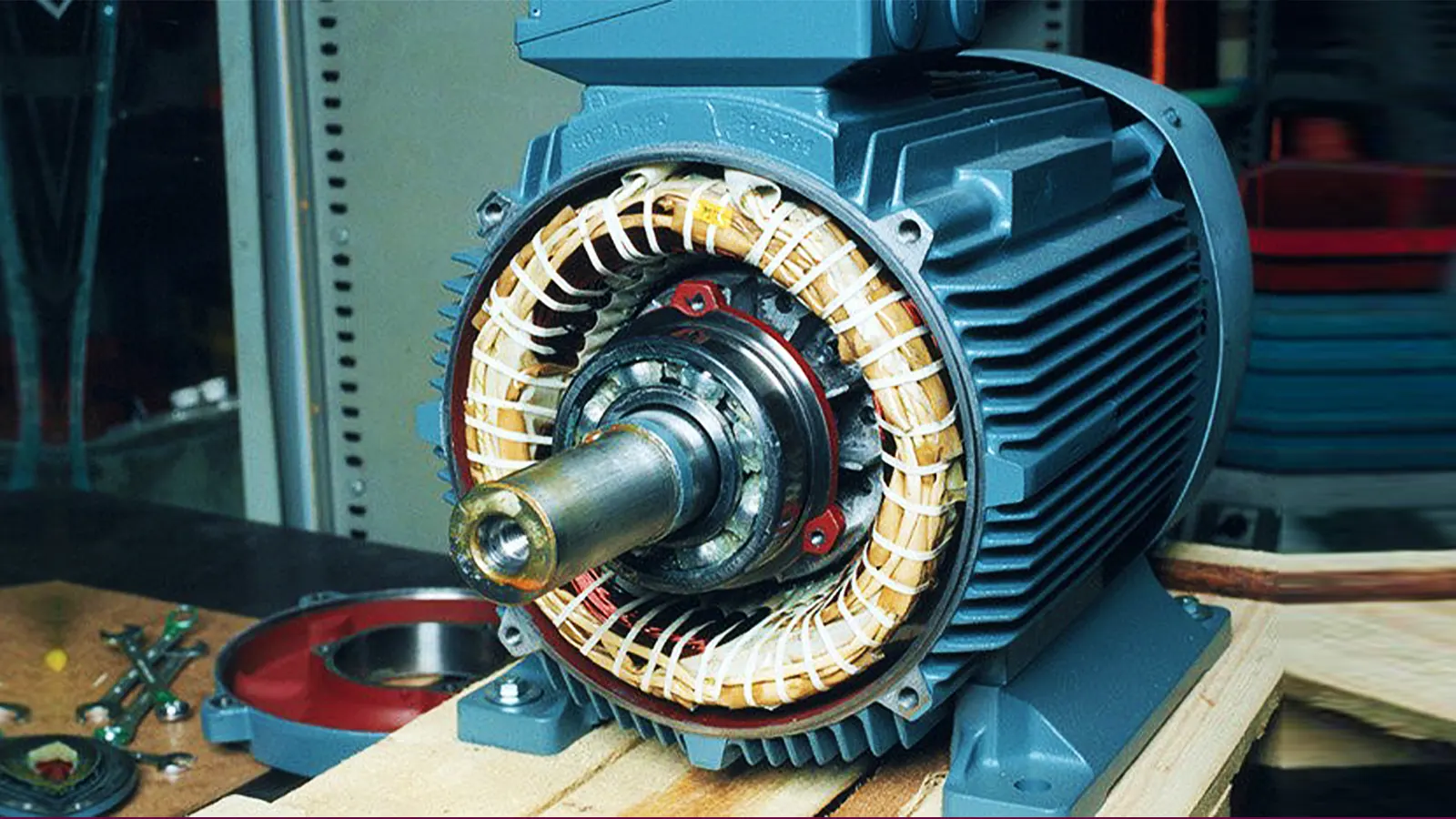
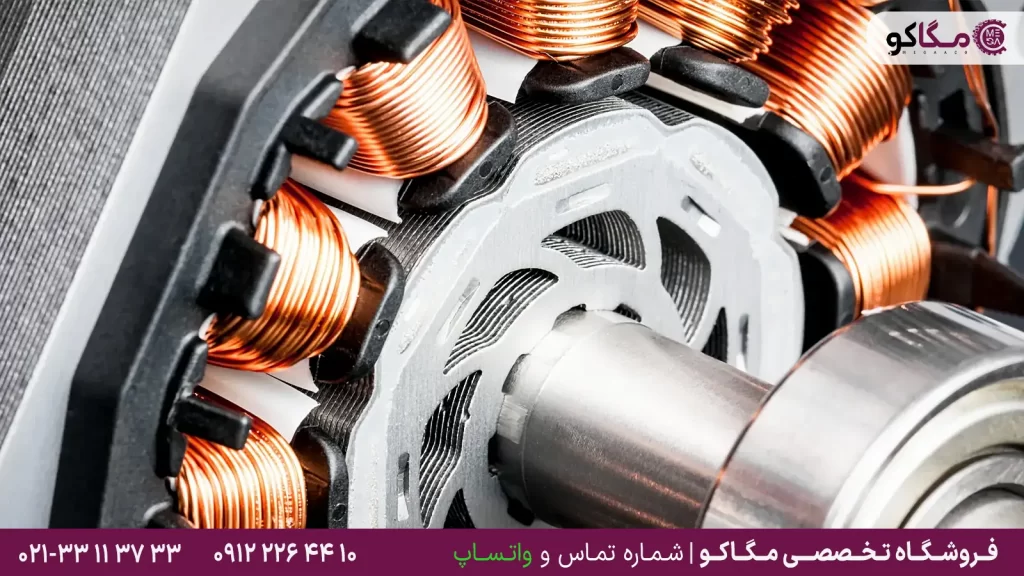
یک الکتروموتور از دو جزء الکتریکی تشکیل شده است که در ارتباط با یکدیگر حرکت می کنند و در صورت ترکیب، یک مدار مغناطیسی ایجاد می کنند. یکی از این اجزا بر روی استاتور قرار دارد که عنصر ثابت موتور متصل به قاب است، در حالی که دیگری روی روتور نصب شده است که می چرخد. در اکثر موتورها، آهنربای میدان روی استاتور و آرمیچر روی روتور قرار دارد، اما همیشه اینطور نیست.

روتور، که شافت را برای ارائه نیروی مکانیکی می چرخاند، بخش متحرک یک موتور الکتریکی است. روتور معمولاً دارای هادی های حامل جریان است که میدان مغناطیسی استاتور برای چرخاندن شافت به آنها نیرو وارد می کند. از طرف دیگر، برخی از روتورها حاوی آهنربا های دائمی هستند که رساناها توسط استاتور نگه داشته میشوند.
بلبرینگ ها از روتور پشتیبانی می کنند و آن را قادر می سازند تا حول محور خود بچرخد. محفظه موتور نیز به نوبه خود از یاتاقان ها پشتیبانی می کند. شافت موتور از داخل موتور به بیرون، جایی که بار اعمال می شود، از طریق یاتاقان ها گسترش می یابد. هنگامی که نیروهای بار فراتر از بیرونی ترین یاتاقان اعمال شده باشد، گفته میشود که بار بیش از حد آویزان می شود.
وقتی با جریان تغذیه میشود، سیمپیچها سیمهایی هستند که در سیمپیچها قرار میگیرند و دور یک هسته مغناطیسی آهنی چند لایه پیچیده میشوند تا قطبهای مغناطیسی تولید کنند.
پیکربندی های قطب برجسته و غیر برجسته، دو مورد از رایج ترین پیکربندی های قطب مغناطیسی در دستگاه های الکتریکی هستند. هستههای فرومغناطیسی روتور و استاتور دارای برجستگیهایی به نام قطبهایی هستند که روبروی یکدیگر قرار دارند، با یک سیم در اطراف هر قطب در زیر سطح قطب، که با عبور جریان از سیم به قطب شمال و جنوب میدان مغناطیسی تبدیل میشوند. هسته فرومغناطیسی یک ماشین با قطب غیر برجسته، یک استوانه صاف است که سیم پیچ ها به طور مساوی در شکاف های اطراف محیط پراکنده شده اند. یک الکتروموتور دارای سیم پیچی در اطراف قسمتی از قطب است که فاز میدان مغناطیسی آن قطب را به تاخیر می اندازد. جریان متناوب در سیم پیچ ها قطب هایی را در هسته تشکیل می دهد که به طور مداوم تغییر می کنند.
آهنرباهای میدان، که یا الکترومغناطیس های ساخته شده از سیم پیچ های سیم در اطراف یک هسته آهن فرومغناطیسی یا آهنرباهای دائمی هستند، استاتور را تشکیل می دهند، که عنصر ثابت مدار الکترومغناطیسی الکتروموتور است که روتور را در بر می گیرد. این یک میدان مغناطیسی ایجاد می کند که از طریق آرمیچر روتور جریان می یابد و روی سیم پیچ ها عمل می کند. هسته استاتور از بخش های لایه ای تشکیل شده است که ورقه های فلزی نازکی هستند که از یکدیگر جدا شده اند. ورقه ورقه ها برای کاهش اتلاف انرژی که با یک هسته جامد رخ می دهد استفاده می شود. کیفیت میرایی رزین (پلاستیک) در موتورهای بسته بندی رزین مورد استفاده قرار می گیرد که در ماشین لباسشویی و تهویه مطبوع برای کاهش صدا و لرزش استفاده می شود. استاتور در این الکتروموتورها به طور کامل در پلاستیک قرار گرفته است.
در برخی از الکتروموتورها، کموتاتور یک کلید الکتریکی دوار است که برق را به روتور می فرستد. آرمیچر چرخان دستگاه از یک سیلندر تشکیل شده است که از چندین بخش تماس فلزی تشکیل شده است. دو یا چند “برس” متشکل از یک ماده رسانای نرم مانند پرس کربن بر روی کموتاتور، تماس لغزشی با بخش های متوالی کموتاتور در حین چرخش آن، ایجاد جریان به روتور. بخش های کموتاتور به سیم پیچ های روتور متصل می شوند.
با هر نیم چرخش (180 درجه)، کموتاتور جهت جریان را در سیم پیچ های روتور تغییر می دهد و اطمینان حاصل می کند که میدان مغناطیسی استاتور همان گشتاور را روی روتور اعمال می کند. اگر جریان معکوس نمی شد، جهت گشتاور روی هر سیم پیچ روتور با هر نیم چرخش معکوس می شد و روتور متوقف می شد. موتورهای جریان مستقیم بدون جاروبک، موتورهای مغناطیس دائم و موتورهای القایی به دلیل ناکارآمدی بیشتر جایگزین موتورهای کموت شده شده اند.
آژانس های نظارتی بسیاری از کشورها مقرراتی را برای تشویق توسعه و استفاده از موتورهای الکتریکی با راندمان بالاتر معرفی و اجرا کرده اند. بازده الکتروموتور ها بسته به بار، از حداقل 15 درصد تا 98 درصد برای موتورهای آهنربای دائم متغیر است. به طور معمول، اوج راندمان در 75٪ از بار نامی موتور رخ می دهد. به عنوان مثال، یک موتور 10 اسب بخاری در هنگام رانندگی با بار 7.5 اسب بخار کارآمدتر است. راندمان موتور نیز تحت تأثیر اندازه آن است. موتورهای بزرگتر کارآمدتر هستند. برخی از الکتروموتورها نمی توانند به طور مداوم برای مدت زمان مشخصی کار کنند (مثلاً بیش از یک ساعت در هر کار).
با این حال، برخی از توان های الکتریکی از دست رفته بر راندمان الکتروموتورها تأثیر منفی می گذارد که در ادامه بیان می شود.
تلفات مس، توان الکتریکی از دست رفته در مقاومت سیم پیچی روتور اولیه و استاتور ثانویه است. تلفات مس متناسب با مجذور جریان است و با بار در نوسان است.
هنگامی که میدان مغناطیسی موتور به هسته استاتور می رسد، انرژی مغناطیسی تلف می شود.
اصطکاک در بلبرینگ موتور و فن برای تهویه مطبوع نمونه هایی از تلفات مکانیکی هستند.
پس از تلفات مس اولیه و ثانویه، تلفات آهن و تلفات مکانیکی، تلفات سرگردان تلفاتی هستند که باقی می مانند. انرژی های هارمونیک ایجاد شده زمانی که موتور با سرعت کامل کار می کند بیشتر تلفات سرگردان را تشکیل می دهد. جریان در سیم پیچ مسی، اجزای شار هارمونیک در مقاطع آهنی و نشتی در هسته ورقه ای همگی راه هایی هستند که این انرژی ها را هدر می دهند.
همانطور که قبلاً گفته شد، راندمان الکتروموتور با نحوه استفاده از آنها توسط تولید کنندگان، صنایع و صاحبان خانه تعیین می شود. کاربران می توانند روش های زیر را برای اطمینان از کارایی و طول عمر موتور انجام دهند:
در حالی که الکتروموتورهای هوشمند به طور گسترده مورد استفاده قرار می گیرند و در دسترس هستند، انتخاب شرایط بهینه برای به حداقل رساندن زمان خرابی، افزایش راندمان و کاهش هزینه ها حیاتی است. همانطور که مهندسان صنایع به خوبی از آن آگاه هستند، مصرف برق توسط موتورها می تواند بر بودجه عملیاتی شرکت فشار وارد کند. آنها معمولاً از فناوریهای کنترل موتور برای کاهش این مشکل استفاده میکنند، که فقط از مقدار انرژی مورد نیاز برای راهاندازی الکتروموتورها، آنالیز دادههای تشخیصی و صرفهجویی در زمان خرابی استفاده میکنند. با شروع محبوبیت الکتروموتور، تکنولوژی آیدلیگ استاپ یا خاموش و روشن کردن خودکار الکتروموتور برجسته تر می شود.
موثرترین تکنیک برای صرفه جویی در انرژی، خاموش کردن الکتروموتور در زمانی است که از آن استفاده نمی شود، که به همین سادگیست به نظر می رسد. اکثر مردم در خاموش کردن موتور مردد هستند زیرا تصور می کنند که راه اندازی مکرر آن باعث ساییدگی و پارگی قابل توجهی می شود. استارتهای نرم، که میتوانند ساییدگی و پارگی را کاهش دهند، یکی از تکنیکهای کاهش این مشکل هستند. یک سافت استارتر که به درستی نصب و طراحی شده باشد می تواند به کاهش فشار مکانیکی و الکتریکی سیستم کمک کند.
اندازه موتور و کیفیت کارایی آن دو عنصری هستند که در راندمان آن تأثیر می گذارند. اندازه یک موتور، به خصوص برای موتورهای کوچکتر، تأثیر بسزایی در کارایی آن دارد. طبقه بندی راندمان برای موتورهای بزرگتر اهمیت بیشتری دارد.
الکتروموتور های کم مصرف انرژی کمتری مصرف می کنند، احتمال گرم شدن بیش از حد کمتری دارند و عمر طولانی تری دارند. این موتورها با طراحی برتر خود متمایز می شوند که منجر به اتلاف حرارت کمتر و کاهش نویز می شود. مواد با کیفیت بالا، تحملهای بهتر و روشهای تولید پیشرفته، همگی به کاهش اتلاف انرژی و افزایش کارایی کمک میکنند.

یکی از دغدغه های اصلی کاربران کاهش استهلاک موتور است. هنگامی که یک موتور الکتریکی در حال کار است، جریانها و تنشهای اولیه بالا، سیستمهای مکانیکی و الکتریکی را تحت فشار قرار میدهند و باعث سایش و پارگی قابل توجهی میشوند. اگرچه این می تواند مضر باشد، اما میتوان اثرات منفی آن را با استفاده از شروع/استارت های نرم کاهش داد. از VSD ها نیز می توان استفاده کرد، اما گران تر و ناکارآمدتر هستند.
موتورهای بزرگ معمولاً با کمتر از 50 درصد بار نامی خود کار میکنند، که باعث می شود نه تنها کارآمد نباشند، بلکه گرانتر از موتورهای با اندازه مناسب هستند. علاوه بر این، آنها ممکن است منبع تغذیه دستگاه را کاهش دهند و بار سیستم الکتریکی را افزایش دهند.
دو عامل تعیین کننده که می تواند به صرفه جویی در مصرف برق کمک کند، نحوه طراحی الکتروموتور و نحوه استفاده از آن است. بیایید با جنبه طراحی شروع کنیم.
وقتی صحبت از هدایت موتور می شود، کویل های مسی همیشه به کویل های آلومینیومی قدیمی ترجیح داده می شوند. این به دلیل رسانایی ضعیفتر آلومینیوم نسبت به مس است. سیمهای آهنربایی آلومینیومی ممکن است به سطوح مقطع بزرگتری نیاز داشته باشند تا با سیمپیچهای مسی هماهنگی داشته باشند و رسانایی یکسانی را ارائه کنند. در مقایسه با یک موتور سیم مسی با همان اندازه، سیمپیچهایی که با سیم آلومینیومی پیچیده میشوند ممکن است حجم بیشتری داشته باشند.
مس همچنین در مورد روتورها دارای مزیت است. روتورهای مس برای شرکتهای آگاه به انرژی در کشورهای صنعتی و در حال توسعه که برق اغلب کمیاب و گران است، مورد علاقه است. از نظر کیفیت الکتروموتور، قابلیت اطمینان، مقرون به صرفه بودن، کارایی و طول عمر، روتورهای مسی بهترین گزینه نسبت به روتورهای آلومینیومی هستند.
فولاد الکتریکی با تکنولوژی بالا برای تولید استاتورها و روتورهای مقرون به صرفه برای انواع کاربردهای موتور الکتریکی مورد نیاز است. برای عملکرد درجه یک، این نوع فولاد نفوذپذیری مغناطیسی قوی و حداقل تلفات توان را تضمین می کند. از طرف دیگر تلفات برق در فولاد الکتریکی وجود دارد. هنگامی که یک میدان مغناطیسی متناوب می شود، جریان های گردابی که به عنوان جریان های فوکو نیز شناخته می شوند، ظاهر می شوند. جریان های گردابی کنترل می شوند و تلفات جریان با نورد فولاد به یک گیج باریک تر کاهش می یابد. این به ویژه برای فرکانس های بالاتر از 50 یا 60 هرتز معمولی صادق است.
ماشینکاری فرآیند حذف مواد از یک واحد محفظه و تبدیل آن به یک ماده قابل قبول تر است. ماشینآلات دقیق میتوانند دقت مورد نیاز برای تولید مواد را در مقادیر دلخواه، چه برای برش فلز و چه برای استخراج زغالسنگ، ارائه دهند. برای بهرهوری و کارایی مطلوب، قطعات ماشین متحرک باید به طور منظم نگهداری شوند. فقط کارشناسان باید تعمیر و نگهداری را انجام دهند و تمام قطعات باید به طور کامل بررسی شوند.
سیم پیچ های فاز در الکتروموتورهایی با قدرت متوسط، رسانای کوچکتری دارند. برای بهبود نیروی مغناطیسی یا چگالی جریان، تعداد چرخش سیم پیچ باید زیاد باشد. مقاومت سیم پیچ فاز و چگالی تلفات توان نیز در موتورهای کم مصرف بیشتر از موتورهای پرقدرت است. در نتیجه، موتورهای پرسرعت و کم مصرف نیروی مغناطیسی بیشتری را طلب خواهند کرد. این بدان معنی است که سیم پیچ های بیشتری مورد نیاز خواهد بود و همچنین تعداد چرخش های بیشتری روی یک سیم نازک با چگالی جریان بالاتر لازم است.
با تبدیل شدن “بهره وری انرژی” به یک کلمه رایج، ضروری است که این مفهوم در برنامه های روزمره خانگی و صنعتی گنجانده شود. مزایای زیادی را میتوان از استفاده از الکتروموتورهای کم مصرف به دست آورد. آنها می توانند خنک تر عمل کنند، استانداردهای خدمات بیشتری را ارائه دهند، عمر طولانی تری داشته باشند، عایق بهتری ارائه دهند و با نصب صحیح صدا و لرزش کمتری تولید کنند. سازندگان موتور علاقهمند خواهند بود که با توجه به مزایای بی شمار، تضمین کنند که در حال ایجاد و به کارگیری با صرفه ترین الکتروموتورهای ممکن هستند.
راندمان فقط تفاوت بین توان خروجی (مفید) و توان ورودی است، با تلفات ناشی از ایرادات طراحی و سایر موارد اجتناب ناپذیر تفاوت را به حساب می آورد. برای الکتروموتور های 1 تا 4 اسب بخار، راندمان 0.8 قابل قبول است، در حالی که برای موتورهای 5 اسب بخار و بالاتر، بازده 0.9 ترجیح داده می شود.
ABB اخیراً رکورد جهانی جدیدی را برای بازده موتورهای سنکرون الکتریکی به ثبت رسانده است. در یک موتور سنکرون 44 مگاواتی، 6 قطبی، آنها 99.05 درصد راندمان بار کامل را در طول تست های پذیرش کارخانه (FATs) با حضور مشتری به دست آوردند.
برای خرید الکتروموتور ضد انفجار abb آلمان کلیک کنید.
نسبت توان مکانیکی خروجی به توان الکتریکی ورودی به عنوان راندمان موتور الکتریکی شناخته می شود. از آنجایی که انرژی به اشکال مختلف در طول تبدیل (الکتریکی به مکانیکی) مانند گرما و اصطکاک هدر می رود، توان مکانیکی خروجی همیشه کمتر از توان الکتریکی ورودی است.
الکتروموتور بر اساس اصل اثرات مغناطیسی جریان کار می کند. بر این اساس کار می کند که وقتی یک سیم پیچ مستطیلی در میدان مغناطیسی قرار می گیرد و الکتریسیته از آن عبور می کند، سیم پیچ در اثر نیروهای وارده به آن می چرخد.
سیمپیچهای مسی در سیمپیچهای استاتور میتوانند الکتروموتور های القایی را در مصرف انرژی کارآمدتر کنند. در روتور از میله های مسی استفاده می شود. ماشینکاری دقیق تمام قطعات متحرک یکی دیگر از روش های افزایش راندمان الکتروموتور است.

فروشگاه مگاکو ارائه دهنده تخصصی الکتروموتور، گیربکس صنعتی، پمپ و اینورتر میباشد. ما سعی داریم علاوه بر ارائه محصولات متنوع و اورجینال، مقالات تخصصی و مرتب با محصولاتمان را ارائه دهیم. این مقالات با هدف تسهیل در درک مشتری نسبت به نوع تجهیزات، کاربرد آنها، تعمیر و بهبود کارایی و ... میباشد.



سوالی دارید؟ با ما تماس بگیرید.
33 37 11 33 - 021 و 37 09 95 33 - 021
ارسال به کل کشور
برای تمامی سفارشات شما
پرداخت در بستری امن
پرداخت با توجه به شرایط مشتری
پشتیبانی آنلاین و تلفنی
در ساعات اداری
شرکت بازرگانی مگاکو با هدف تامین موتورالات صنعتی و ارائه مشاوره به صنعتگران عزیز، افتخار همکاری با صنایع مختلف را دارد. بازرگانی مگاکو مفتخر به همکاری با پالایشگاه ها وسایر صنایع بوده و با واردات الکتروموتورهای ضد انفجار (EEX)برند weg برزیل و سایر برندهای معتبر در زمینه نفت و گاز، پتروشیمی به فعالیت در این زمینه می پردازد.
تمامی حقوق این سایت متعلق به فروشگاه مگاکو می باشد.