سوالی دارید؟ با ما تماس بگیرید.
33 37 11 33 - 021 و 37 09 95 33 - 021
ارسال به کل کشور
برای تمامی سفارشات شما
پرداخت در بستری امن
پرداخت با توجه به شرایط مشتری
پشتیبانی آنلاین و تلفنی
در ساعات اداری

عناوین مقاله
Toggleشناخت انواع الکتروموتور یا موتورهای الکتریکی به دلیل استفاده گسترده از آن ها از مصارف خانگی تا صنعتی هرگز خالی از فایده نیست. اگر یک سیستم تهویه مطبوع در خانه دارید یا در یک کارخانه صنعتی از کمپرسور هوا استفاده می کنید، پس شما از موتورهای الکتریکی استفاده می کنید. بنابراین، اگر در مورد انواع موتورهای الکتریکی اطلاعات داشته باشید، می توانید سیستم خود را بهتر درک کنید و کنترل بهتری بر عملکرد آن داشته باشید.
در اینجا در مگاکو ما چندین دسته بندی از الکتروموتور(ضد انفجار ، معمولی ، چینی) برای شما فراهم کرده ایم تا بتوانید انوع موتورهای الکتریکی مورد نیاز خود را پیدا کنید. علاوه بر این، در این پست سعی داریم تا انواع موتورهای الکتریکی را برای شما معرفی کنیم. بنابراین، با ما همراه باشید!
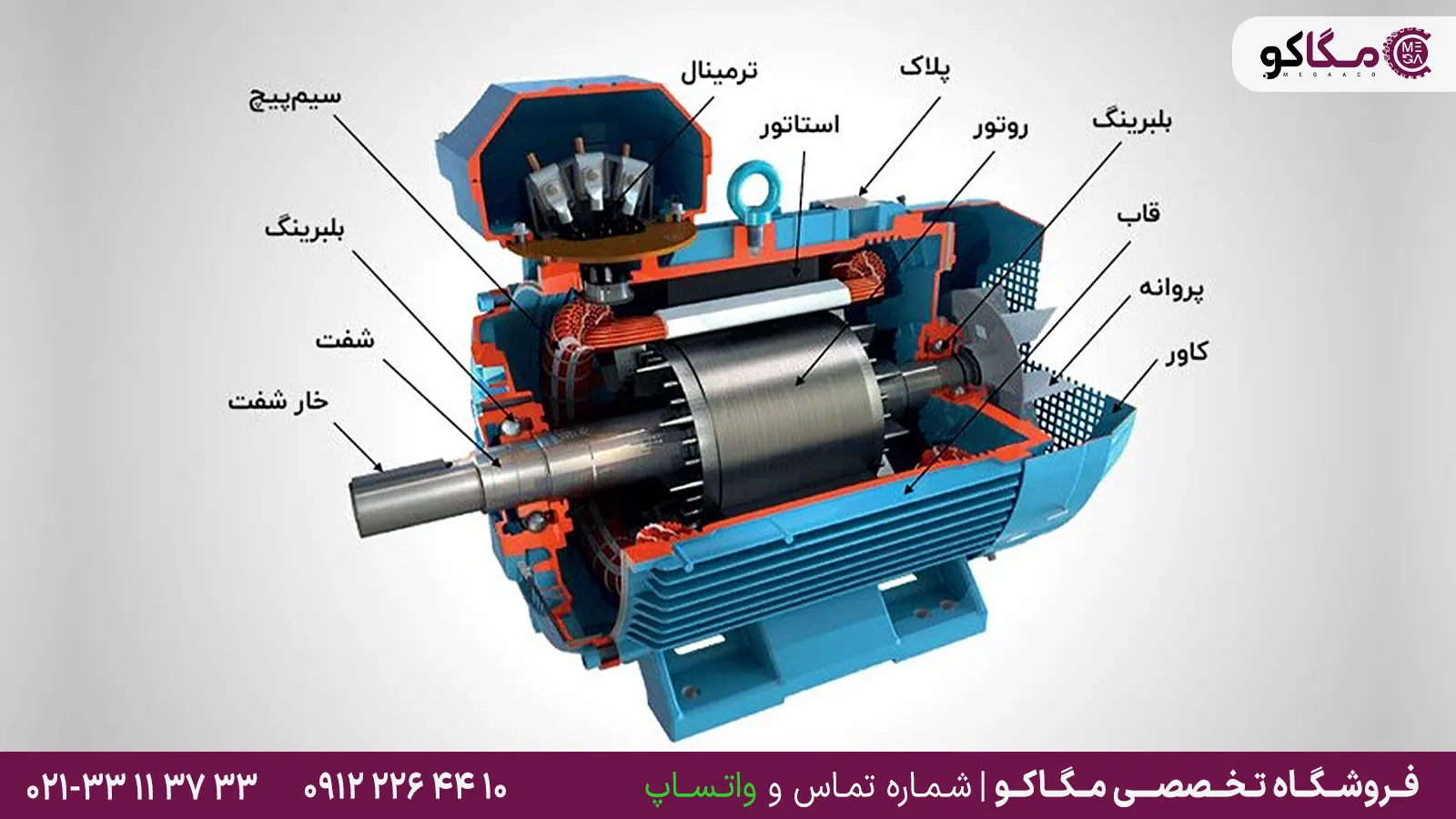
قبل از دانستن انواع موتورهای الکتریکی، بهتر است با این سوال شروع کنیم که موتور الکتریکی چیست؟ کوتاه ترین پاسخ این است که موتور الکتریکی فقط موتور یک وسیله الکترومکانیکی است که انرژی الکتریکی را دریافت کرده و آن را به حرکت یا انرژی مکانیکی تبدیل می کند. این حرکت بیشتر به شکل چرخشی است. جریان الکتریکی یک میدان مغناطیسی را القا می کند و آنچه در موتور الکتریکی اتفاق می افتد ایجاد یک حرکت چرخشی عمود بر جهت جریان و میدان مغناطیسی است.
موتورهای الکتریکی را می توان برای مصارف خانگی استفاده کرد، به عنوان مثال، در وسایل برقی مانند تهویه مطبوع، جاروبرقی، پنکه، غذاساز و غیره که همگی از نیروی چرخشی موتورهای الکتریکی به روش خاص خود استفاده می کنند یا حتی در اسباب بازی ها. مانند ماشینهای اسباببازی با کنترل از راه دور یا برنامه یا هواپیماهای مدل.
وقتی صحبت از خودروهای مدل برقی شد، نسخههای پیچیدهتر موتورهای الکتریکی بزرگتر را میتوان در خودروها و هواپیماهای برقی با اندازه واقعی یافت (خب، این هواپیماها هنوز در حال مطالعه هستند تا به صورت تجاری در دسترس قرار گیرند).
آخرین اما نه کم اهمیت ترین، برخی از انواع موتورهای الکتریکی به طور گسترده برای کاربردهای صنعتی مانند کمپرسورهای گاز صنعتی، پمپ ها، وسایل نقلیه بالابر، میکسرها و غیره استفاده می شوند.
انواع موتورهای الکتریکی را می توان به روش های مختلفی طبقه بندی کرد. یکی از راه های طبقه بندی بر اساس محفظه های آنها خواهد بود. ما موتورهای ضد قطره باز (ODP) مناسب برای کاربردهای تمیز، خشک و داخلی داریم که نسخه پیشرفته آن موتورهای محافظت شده در آب و هوا با پیکربندی محفظه WP1 یا WP2 هستند. ما همچنین دارای تنظیمات محفظه با فن خنک کننده کامل (TEFC)، هوای کاملا محصور (TEAO)، تهویه اجباری کاملا محصور (TEFV) و محفظه بدون تهویه کامل (TENV) برای انواع مختلف موتورهای الکتریکی هستیم. موتورهای ضد انفجار (Ex) نیز وجود دارند که در مناطق خطرناک با احتمال انفجار به دلیل وجود مقداری مایعات انفجاری، گرد و غبار و غیره در منطقه مورد استفاده قرار می گیرند.
با این وجود، موتورهای الکتریکی معمولاً بر اساس منبع انرژی آنها طبقه بندی می شوند. موتورهای متناوب یا AC وجود دارند که در آنها جریان در فرکانس خاصی تغییر جهت می دهد. همچنین موتورهای جریان مستقیم یا DC وجود دارند که به دلیل کنترل آسان سرعت، به طور گسترده در کاربردهای مقیاس کوچک استفاده می شوند.
موتورهای AC به دو دسته تک فاز و سه فاز تقسیم می شوند. موتور تک فاز می تواند به توانی در حدود 3 کیلووات برسد که از منبع تغذیه تک فاز تامین می شود، که این مورد برای کاربردهای خانگی و تجاری است. از طرف دیگر موتور سه فاز می تواند تا حدود 300 کیلووات برق تولید کند. این موتورها گزینه مناسبی برای کاربردهای صنعتی هستند.
همانطور که قبلا ذکر شد، موتور AC یکی از انواع موتورهای الکتریکی است که از جریان با جهت متناوب استفاده می کند. کنترل سرعت این موتورها به راحتی موتورهای DC نیست. با این حال، با کمی جریمه قدرت، می توان از موتورهای AC با درایوهای فرکانس متغیر برای کنترل سرعت بهتر استفاده کرد.
دو نوع موتور AC پرکاربرد و یک نوع کمتر رایج دیگر وجود دارد:
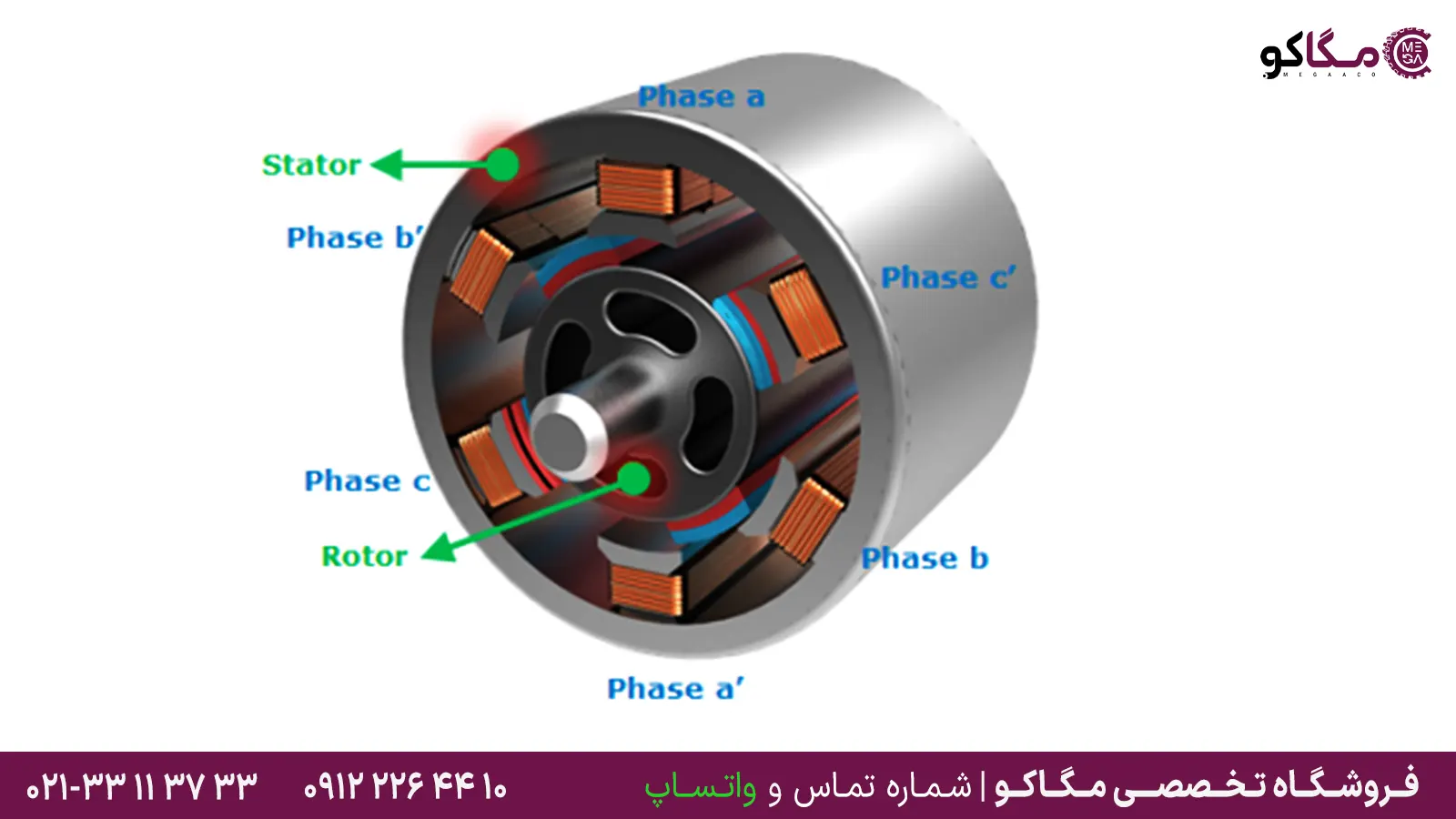
موتور القایی یا ناهمزمان مکانیزمی است که هرگز با سرعت سنکرون کار نمی کند. این موتور با استفاده از پدیده القای الکترومغناطیسی توان الکتریکی را به نیروی مکانیکی تبدیل می کند. در این نوع موتورهای الکتریکی، میدان مغناطیسی در استاتورها می چرخد که باعث القای جریان در روتور و در نتیجه چرخش موتور می شود. از آنجایی که چرخش روتور توسط یک میدان مغناطیسی خارج از آن القا می شود، این موتورها از بیرون برانگیخته می شوند. دو نوع موتور القایی بر اساس ساختار روتور وجود دارد: موتورهای القایی قفس سنجابی و موتورهای القایی زخم فاز.
آنچه در انواع موتورهای الکتریکی سنکرون اتفاق می افتد اعمال میدان مغناطیسی مستقیم به سیم پیچ های روتور است که معایب و مزایای خاص خود را دارد. چنین موتورهای برانگیخته داخلی نیاز به حفاظت و کنترل متفاوتی نسبت به موتورهای آسنکرون دارند.
انواع خطی از موتورهای الکتریکی نیز وجود دارند که در آنها استاتور و روتور نورد نمی شوند و بنابراین به جای گشتاور نیروی خطی تولید می کنند. این نوع موتور معمولا در درب های کشویی و محرک ها یافت می شود.
موتور القایی یکی از انواع موتورهای الکتور است که احتمالاً بیشترین کاربرد را برای کاربردهای صنعتی دارد. استاتور به دلیل اتصال به شبکه برق مغناطیسی می شود، سپس میدان مغناطیسی ولتاژ و در نتیجه جریانی در سیم پیچ های روتور ایجاد می کند، سپس جریان القایی در روتور میدان مغناطیسی دیگری ایجاد می کند و سپس برهمکنش بین این دو میدان مغناطیسی ایجاد می شود که نیروی چرخشی یا گشتاوری را تولید می کند که محور موتور را به حرکت در می آورد.
این موتورها دارای طراحی بسیار ساده و ساختار مستحکم با قیمت پایین و نگهداری آسان هستند. آنها همچنین دارای طیف گسترده ای از رتبه بندی های قدرت هستند همانطور که قبلاً گفته شد پرکاربردترین انواع موتورهای الکتریکی هستند. با این وجود، کنترل سرعت بدون درایو فرکانس متغیر که باعث می شود موتور با ضریب قدرت عقب مانده کار کند، آسان نیست.
همانطور که قبلا ذکر شد موتور القایی در دو نوع موتور القایی روتور قفس سنجابی و موتور القایی روتور زخمی عرضه می شود. هر کدام از این موتورها نیز می توانند تک فاز یا سه فاز باشند. موتورهای القایی تک فاز، نوع کمتری از موتورهای القایی در صنعت هستند. موتور القایی سه فاز یکی از انواع موتورهای الکتریکی است که حدود 70 درصد از سهم بازار موتورهای القایی صنعتی را به خود اختصاص داده است.
موتور روتور زخمی یا موتور حلقه لغزشی پیچ های بیشتری دارد، به این معنی که ولتاژ القایی بالاتری دارد و جریان کمتری نسبت به موتور القایی قفس سنجابی دارد. آنها همچنین می توانند گشتاور شروع بیشتری تولید کنند. از سوی دیگر، ساخت آنها به دلیل تعداد قطعات اضافه شده آنها در مقایسه با موتورهای القایی قفس سنجابی پیچیده تر است، که باعث می شود هزینه واحد آنها و همچنین هزینه های نگهداری آنها به طور قابل توجهی بالاتر باشد.
برخلاف موتورهای القایی، موتورهای سنکرون اساساً خود راه انداز نیستند. تولید میدان مغناطیسی روتور برای این نوع موتورهای الکتریکی به جریان بستگی ندارد و سرعت چرخش برای موتور سنکرون به فرکانس خط متصل است. به عبارت دیگر، چرخش شفت برای انواع موتورهای الکتریکی سنکرون با سرعت همگام با فرکانس جریان تغذیه است.
چیزی که آنها را برای اندازه های صنعتی با تقاضای توان بالاتر جالب می کند، راندمان بالای آنها در تبدیل برق متناوب به کار و توانایی آنها در اصلاح ضریب توان است. این بدان معنی است که آنها می توانند با یک ضریب توان واحد کار کنند که قدرت واقعی بار را برابر با توان ظاهری مدار نشان می دهد.
موتورهای AC سنکرون در دو نوع هستند: غیر تحریکی و دی-سی هیجانی یا excited. انواع موتورهای الکتریکی سنکرون غیر برانگیخته به سه دسته آهنربای دائمی، رلوکتانسی و هیسترزیس طبقه بندی می شوند.
انواع موتورهای الکتریکی سنکرون غیر برانگیخته به گونهای طراحی شدهاند که روتور آنها در مراحل مختلف از میدان چرخش همزمان پیروی کند که یک میدان ثابت ایجاد میکند. هنگامی که روتور موتورهای سنکرون غیر برانگیخته می چرخد، با استاتور تعامل می کند. برهمکنش بین قطب های میدان استاتور و روتور منجر به الکترومغناطیسی شدن روتور با قطب شمال و جنوب می شود. روتور این نوع موتورهای الکتریکی از قابلیت نگهداری بالایی برخوردار است، به این معنی که توانایی قوی در حفظ یا مقاومت در برابر مغناطیسی دارد.
همانطور که قبلا ذکر شد، سه نوع موتور سنکرون غیر تحریکی وجود دارد که عبارتند از موتورهای سنکرون آهنربای دائم، رلوکتانس و هیسترزیس؛ اجازه دهید در ادامه بیشتر درباره آنها بحث کنیم.
در انواع موتورهای الکتریکی سنکرون آهنربای دائم، روتور فولادی به آهنربای دائمی مانند آهنربای نئودیمیم متصل می شود که میدان مغناطیسی پیوسته بدون وقفه را فراهم می کند. این امر با برهمکنش روتور با میدان دوار تولید شده توسط استاتور که منبع جریان متناوب به آن متصل است، تحقق می یابد. دایمی روتور به میدان دوار استاتور قفل می شود که سرعت چرخش همزمان را برای روتور ایجاد می کند. این طراحی شبیه به موتورهای DC بدون جاروبک است که در ادامه مورد بحث قرار خواهد گرفت.
برای راه اندازی این نوع موتورهای الکتریکی، باید منبعی با فرکانس متغیر داشته باشید زیرا روتور این طرح یک آهنربای دائمی است که یک میدان مغناطیسی ثابت تولید می کند. کنترل سرعت با استفاده از کنترل مستقیم گشتاور و کنترل میدان گرا انجام می شود.
روتور برای انواع موتورهای الکتریکی سنکرون رلوکتانسی که هیچ گونه سیم پیچی ندارند، از مواد فرومغناطیسی ساخته شده است که بر روی آن قطب های مغناطیسی غیر دائمی القا می شود. دلیل نامگذاری آن این است که با استفاده از رلوکتانس مغناطیسی، گشتاور تولید می کند، یعنی معیاری برای مقاومت یا مخالفت ماده در برابر شار مغناطیسی.
تعداد قطب های روتور موتورهای سنکرون رلوکتانسی برابر با تعداد قطب های استاتور است. تعداد قطب ها همیشه زوج و معمولاً برابر با چهار یا شش است. با این حال، تعداد قطب های روتور کمتر از تعداد قطب های استاتور برای جلوگیری از موج گشتاور است. ریپل گشتاور افزایش و کاهش دوره ای گشتاور تولید شده توسط شفت موتور است که چیز مطلوبی نیست.
هنگامی که روتور استاتور انرژی می گیرد، گشتاوری در جهت کاهش رلوکتانس مغناطیسی روی روتور اعمال می شود. این گشتاور نزدیکترین کشش روتور را میکشد تا با میدان استاتور در یک موقعیت با رلکتانس کمتر قرار گیرد. بنابراین، برای حفظ چرخش، قطب استاتور باید با چرخش در جلوی قطب های روتور، همچنان از قطب روتور فرار کند.
برای موتورهای سنکرون هیسترزیس، با چرخش میدان مغناطیسی استاتور، روتور یک میدان مغناطیسی معکوس را تجربه می کند. دلیل این پدیده این است که روتور استوانه ای این نوع الکتروموتورها از مواد با اجبار بالا ساخته شده است. این بدان معنی است که هنگامی که روتور در جهتی مغناطیسی می شود، نمی توانید به راحتی جهت آن را بدون اعمال میدان مغناطیسی معکوس بزرگ برگردانید.
میدان مغناطیسی معکوس تجربه شده توسط هر حجم کوچک روتور به دلیل چرخش میدان مغناطیسی استاتور تا رسیدن به سرعت سنکرون ادامه خواهد داشت. این ما را به مزیت موتورهای سنکرون هیسترزیس می رساند که می توانند گشتاور ثابتی را تا رسیدن به سرعت سنکرون بدون امواج گشتاور تولید کنند. نکته دیگر در مورد این نوع موتورها این است که علیرغم وجود سیم پیچی قفس سنجابی به طور معمول برای کمک به راه اندازی موتور، اما موتور می تواند خود راه اندازی شود زیرا حرکت روتور فقط به تاخیر فاز بین استاتور و مغناطیسی روتور بستگی دارد. زمینه های.
روتور این نوع موتورهای الکتریکی با کمک یک منبع DC خارجی که شار مغناطیسی لازم برای به حرکت درآوردن روتور را تولید می کند، تحریک می شود. این می تواند توسط یک منبع DC مجزا یا منبعی که مستقیماً به شفت موتور متصل است انجام شود.
موتورهای خطی یکی از انواع موتورهای الکتریکی AC هستند که به جای گشتاور نیروی خطی تولید می کنند. آنها مشابه مواردی هستند که قبلاً در مورد آنها صحبت شد با این تفاوت که روتورها و استاتورهای آنها باز شده است. آنها به طور گسترده در کاربردهایی مانند قطارهای الکتریکی، محرک هایی مانند درب های کشویی و غیره استفاده می شوند.
در انواع موتورهای الکتریکی DC، انرژی الکتریکی DC به انرژی مکانیکی تبدیل می شود. موتورهای DC می توانند خود تحریک شونده یا جداگانه تحریک شوند. با این حال، موتورهای DC خود انگیخته احتمالاً جالب تر هستند اگر بتوانید از آنها برای برنامه خود استفاده کنید.
موتورهای DC را می توان بر اساس اینکه آیا DC براش دار (BDC) یا DC بدون جاروبک (BLDC) هستند، طبقه بندی کرد. طراحی و ساخت موتورهای DC برس دار ارزان و ساده هستند. با این حال، موتورهای BLDC پیچیده و گران هستند. به طور کلی، برنامه های کاربردی کوچک و غیر حساس مانند لوازم خانگی و شیشه برقی خودرو و صندلی ها می توانند از موتورهای BDC استفاده کنند، در حالی که برنامه هایی مانند HVAC و تبرید، موتورهای الکتریکی خودرو و سایر سیستم های صنعتی مشابه با BLDC کار می کنند.
انواع موتورهای الکتریکی DC برس خورده به صورت داخلی تغییر می کنند، به این معنی که گشتاور مستقیماً از برق DC تأمین شده با کمک آهنرباهای دائمی ثابت یا آهنرباهای الکتریکی و آهنرباهای الکترومغناطیس چرخان تولید می شود. آنها بسیار ارزان و بسیار قابل اعتماد هستند. با استفاده از یک سیستم دو سیم ساده می توانید سرعت آنها را به راحتی کنترل کنید، اگرچه برخی از طرح های سرعت ثابت وجود دارد که برای آنها کنترل سرعت وجود ندارد.
همچنین می توانید برخی از معایب را در موتورهای DC برس دار مانند نیاز به تعمیر و نگهداری دوره ای که به طور خاص توسط برس ها تحمیل می شود و طول عمر کم برای کارهای پرمشقت که برای آنها گشتاور یا سرعت زیاد است، بیابید. موضوع مهم دیگر سرعت محدود آنها به دلیل وجود برس ها و ایجاد تداخل الکترومغناطیسی (EMI) توسط قوس برس است.
سیمپیچهای میدانی یا سیمپیچهای موتورهای DC برس خورده با شنت زخمی به موازات آرمیچر متصل میشوند. از این رو نام این نوع موتورهای الکتریکی است. در این پیکربندی سیمپیچها، جریان تامینشده بین آرمیچر شنت و سیمپیچهای میدان توزیع میشود. تنظیم سرعت با موتورهای BDC زخمی شنت بسیار آسان است.
هنگامی که بار به موتورهای DC برس دار شنت زخمی شده اعمال می شود، سرعت تمایل به کاهش دارد، اما ولتاژ خالص در این شرایط افزایش می یابد. هنگامی که ولتاژ خالص افزایش می یابد، جریان آرمیچر افزایش می یابد و این بدان معنی است که مقداری گشتاور اضافی تولید می شود که کاهش سرعت ناشی از اعمال بار را جبران می کند و این نوع موتورهای الکتریکی را به دستگاه هایی با سرعت ثابت تبدیل می کند.
همه اینها به این معنی است که اگر نیاز به گشتاور راه اندازی کم و همچنین تنظیم سرعت خوب دارید، احتمالاً می خواهید چنین موتوری را در نظر بگیرید.
اگر به جای اتصال سیمپیچهای آرمیچر و سیمپیچهای میدان بهصورت سری به جای موازی، یک موتور DC برسدار سریپیچ شده دریافت میکنید. واضح است که جریان در هر دو سیم پیچ میدان و آرمیچر برای این طرح برابر است. آنها به مقدار قابل توجهی جریان نیاز دارند، اما گشتاوری که تولید می کنند به خصوص در هنگام راه اندازی بسیار زیاد است.
با این حال، این طراحی با تنظیم سرعت چندان خوب نیست. دلیل آن این است که با وجود افزایش ولتاژ به دلیل بارگذاری، موتور جریان را افزایش می دهد تا بالا برود، اما میدان مغناطیسی در نهایت اشباع می شود، به این معنی که شار بین آرمیچر و استاتور به اندازه کافی سریع بالا نمی رود، یعنی گشتاور کافی نیست. تولید خواهد شد تا سرعت را به شرایط قبلی بازگرداند.
میتوان گفت که میتوانید در مواقعی که به گشتاور راهاندازی بالا نیاز دارید، انواع موتورهای الکتریکی را در نظر بگیرید، اما به تنظیم سرعت آنقدر اهمیت ندهید.
اگر به BDC نیاز داشتید که هم گشتاور راه اندازی بالا و هم کنترل سرعت خوب داشته باشد؟ خوب، یک راه حل برای آن نیز وجود دارد: موتورهای DC برس خورده مرکب. موتورهای زخم مرکب یک “نوع ترکیبی” از موتورهای DC زخمی شنت و موتورهای DC برس خورده سری هستند. در این نوع الکتروموتورها یک سیم پیچ میدانی به صورت سری با سیم پیچ آرمیچر و دیگری شنت سیم پیچ میدانی با سیم پیچ آرمیچر وجود دارد.
برای موتورهای BDC زخمی ترکیبی، پیکربندی شنت کوتاه و پیکربندی طولانی وجود دارد. اگر میدان شنت فقط موازی با آرمیچر بود، یک پیکربندی شنت کوتاه بود، اما اگر میدان شنت موازی با سری آرمیچر و میدان سری بود، یک BDF ترکیبی با شنت بلند خواهد بود.
میتوانید قطبیت میدان شنت را با قطبیت میدان سری مطابقت داشته باشید، که باعث میشود یک ترکیب تجمعی BDC زخمی شود. این موتور با گشتاور راه اندازی بالا و تنظیم سرعت خوب است. شما همچنین می توانید قطبیت میدان شنت را در تقابل با میدان سری داشته باشید که یک موتور زخمی ترکیبی دیفرانسیل ایجاد می کند.
در یک موتور DC برس دار با آهنربای دائم، آرمیچر توسط آهنرباهای دائمی متصل به سطح داخلی استاتور استوانه ای این نوع موتورهای الکتریکی احاطه شده است. آهنرباها به گونه ای نصب می شوند که قطب های مخالف آهنرباهای مجاور رو به آرمیچر باشد. بنابراین آرمیچر که یک هادی حامل جریان است، نیروی مکانیکی از میدان مغناطیسی این آرایش آهنرباهای دائمی بر آن وارد می شود و در جهت خود می چرخد.
سروموتورها ممکن است واقعاً یکی از انواع موتورهای الکتریکی نباشند و احتمالاً یک دسته خاص خود هستند، اما از آنجایی که ساده ترین موتورهای کوچک از موتورهای BDC آهنربای دائم به همراه سیستم کنترل حلقه بسته استفاده می کنند، تصمیم گرفتیم در اینجا به آنها نیز اشاره کنیم. . سروموتورها دستگاهها یا محرکهای مکانیکی هستند که در مورد کنترل دقیق موقعیت، کنترل سرعت یا کنترل شتاب بسیار مفید هستند. آنها از یک موتور DC، سنسور موقعیت و یک کنترلر تشکیل شده اند.
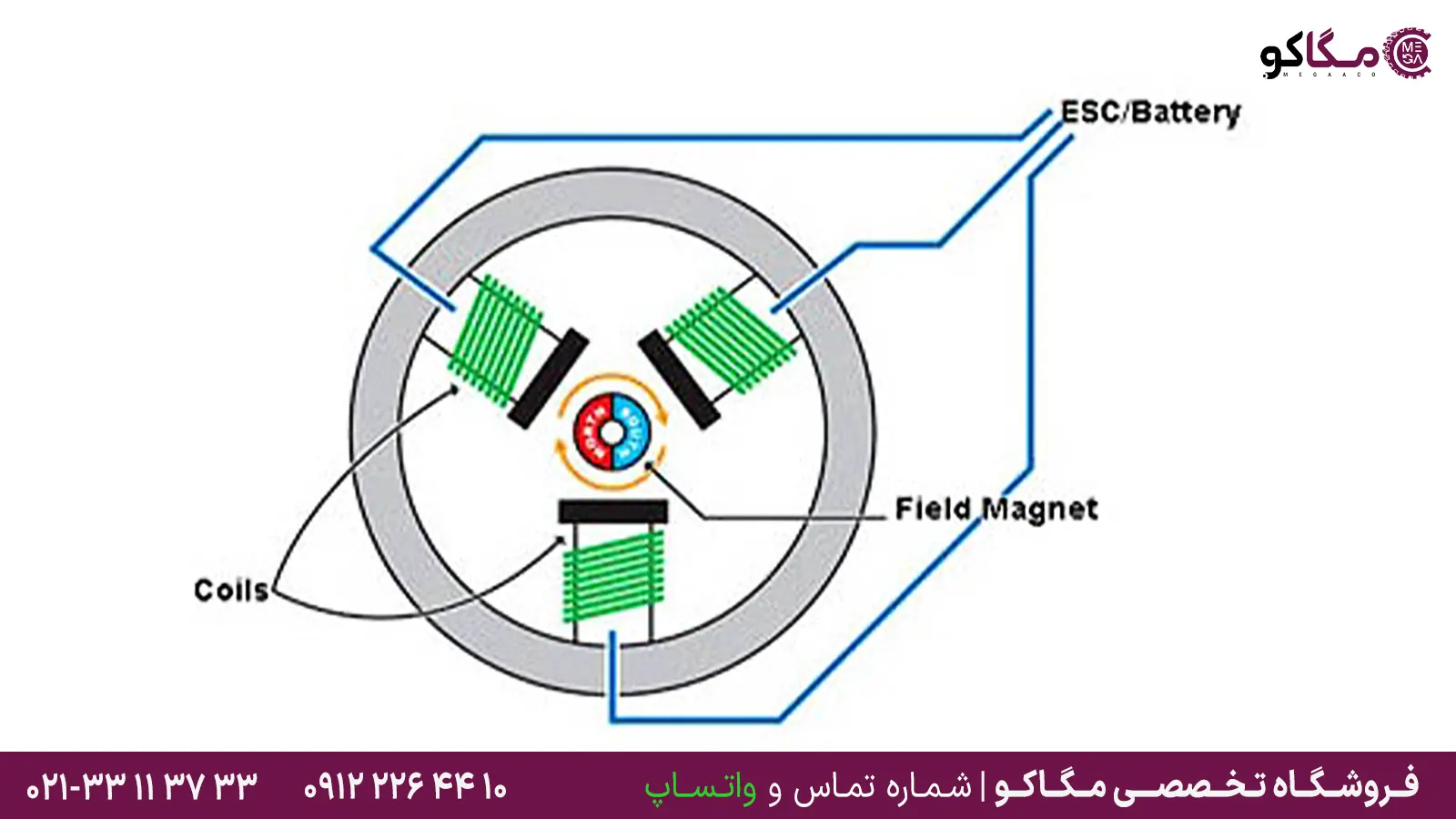
احتمالاً تا به حال متوجه شده اید که برس ها و تعامل آنها با کموتاتور مکانیکی موتورهای BDC، دلایلی برای موتورهای الکتریکی DC بدون جاروبک است. خوب، برس ها فرسوده می شوند و نیاز به نگهداری و تعویض دارند و برس ها جرقه هایی ایجاد می کنند که برای مکان هایی که احتمال انفجار وجود دارد خطرناک است. موتورهای DC بدون جاروبک به صورت الکترونیکی جابجا میشوند و به آنها عمر طولانیتر، ویژگیهای سرعت بهتر در مقابل گشتاور، راندمان بالا، پاسخ دینامیکی بهتر و تغییرات سرعت بالاتر و عملکرد بیصدا میدهند.
این نوع موتورهای الکتریکی هم برای کاربردهای بارهای مختلف و بار ثابت و هم برای کاربردهای موقعیت یابی قابل استفاده هستند و در بازار محبوبیت پیدا می کنند.
نتیجه
بنابراین، همه چیز در مورد انواع موتورهای الکتریکی بود. ما سعی کردیم یک راهنمای ساده در مورد این نوع موتورها ارائه کنیم. در حال حاضر، متفاوت و قابل انعطاف وجود دارد. هدف موتور این است که هر زمان که “یک کنترل حرکت مورد نیاز باشد” این بهترین انتخاب است. موتور باید از استفاده و عملکرد کلی سیستم پشتیبانی کند. در اینجا یک شانس عالی است، اگر نیاز به دانستن بیشتر در مورد انواع موتورهای الکتریکی وجود دارد، در بخش نظرات پایین صفحه یا در واتساپ و یا با تماس تلفنی با ما در ارتباط باشید. کارشناسان ما مشتاقانه منتظر دریافت سوالات شما و پاسخگویی مشتاقانه به آنها خواهند بود.

فروشگاه مگاکو ارائه دهنده تخصصی الکتروموتور، گیربکس صنعتی، پمپ و اینورتر میباشد. ما سعی داریم علاوه بر ارائه محصولات متنوع و اورجینال، مقالات تخصصی و مرتب با محصولاتمان را ارائه دهیم. این مقالات با هدف تسهیل در درک مشتری نسبت به نوع تجهیزات، کاربرد آنها، تعمیر و بهبود کارایی و ... میباشد.




سوالی دارید؟ با ما تماس بگیرید.
33 37 11 33 - 021 و 37 09 95 33 - 021
ارسال به کل کشور
برای تمامی سفارشات شما
پرداخت در بستری امن
پرداخت با توجه به شرایط مشتری
پشتیبانی آنلاین و تلفنی
در ساعات اداری
شرکت بازرگانی مگاکو با هدف تامین موتورالات صنعتی و ارائه مشاوره به صنعتگران عزیز، افتخار همکاری با صنایع مختلف را دارد. بازرگانی مگاکو مفتخر به همکاری با پالایشگاه ها وسایر صنایع بوده و با واردات الکتروموتورهای ضد انفجار (EEX)برند weg برزیل و سایر برندهای معتبر در زمینه نفت و گاز، پتروشیمی به فعالیت در این زمینه می پردازد.
تمامی حقوق این سایت متعلق به فروشگاه مگاکو می باشد.